
编者按:无人机空中交通管理系统(UAS Traffic Management ,简称UTM)不是一个单一的中央系统,UTM是一个非管制的空中交通管理生态系统,UTM利用行业能力提供FAA想要却还没有的服务,UTM开发将最终确定服务内容、角色/责任、信息架构、数据交换协议、软件功能、基础设施和性能要求,以实现对超低空非管制的无人机运行管理,主要解决地面以上400英尺以下超低空空域的非管制运行。
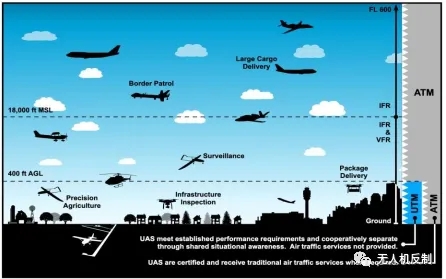
UTM的技术的发展历程,将会经历多个阶段,分别包括目视飞行阶段、人类活动上空运营阶段、超视距飞阶段、包裹交付阶段、异构运营阶段、城市运营阶段。NASA目前提供了四个阶段的演进计划:
UTM1.0 多视距内运行:基于接口的网络化运行;信息共享。
UTM2.0 多超视距运行(乡间):超视距;飞行意图分享;地理围栏。
UTM3.0 多超视距运行(城乡结合部、机场附近):常态超视距运行;空中V2V防撞(机对机防撞);规避静态障碍物。
UTM4.0 城市复杂超视距:超视距运行到门;跟踪和定位;规避动态障碍;处理大规模突发事件。
本智库翻译整理了《FAA城市无人机交通管理(UTM)运行概念2.0版》《国际民航组织无人机交通管理系统(UTM)3.0版本》供读者学习借鉴。
 |  |
FAA城市无人机交通管理(UTM)运行概念2.0版
摘要
无人机技术发展日新月异。随着专业类无人机成为产业发展的重心,小型快递运输、载人UAM、大型长航程无人机逐渐成熟,对无人机运行管理与服务提出全新的需求。无论是规制体系,还是技术方案,都需要消费类无人机解决方案尽快更迭,发挥效益。
美国的无人机法律起步最早,2012年的《FAA现代化与改革法案》明确规定FAA在无人机融入国家空域系统的责任与义务,根据法案要求,FAA 在2013年发布《无人机融入国家空域系统路线图(第一版)》,2016年出台的《107部小型无人机系统》建立了25公斤以内无人机运行规则。根据2017年10月发布的总统备忘录,美国交通运输部选择10个地方政府开展无人机一体化试点计划(IPP),美国联邦、州、地方和部落政府通过IPP开展紧密合作。2018年,联邦航空管理局下一代办公室发布了无人机系统交通管理的总体作战初步概念(V1.0),2020年,无人系统交通管理2.0版出世,2022年八月,2.0版做了更新。
笔者在查阅相关资料的基础上,对英文版原文资料进行了翻译整理。本文囊括了2.0版运营概念的提出背景、实施方案、准入规则以及概念目标等,供读者学习借鉴。如有不准确的地方,请参照英文版资料原文。
国际民航组织无人机交通管理系统(UTM)3.0版本
前言
在过去的十年里,无人驾驶飞机(UA)行业的技术发展扰乱了航空业,并以前所未有的速度增长。因此,各国和监管机构收到了越来越多的进入低空空域的申请,在低空空域,载人飞机的操作通常受到限制。按照目前的速度,预计在不久的将来,民用无人机系统(UAS)的运行数量将超过载人飞机的运行数量。空中导航服务提供商预计,此类行动将包括完全包含在受控或非受控空域,以及跨越其边界的行动。
技术进步的步伐和越来越多的现成组件的使用对及时制定标准构成了重大挑战。特别是,飞机设计和装备缺乏稳定性,以及使用非传统的航空相关通信和导航技术(如人工智能、自动化和机器人),使得任何使用传统认证和运营批准方法的尝试都不切实际。为了满足需求,各国和监管机构正在创新和积极主动地促进及批准此类提案;然而,如果没有充分的国际协调,可能会影响到安全、安保、环境、系统可靠性和经济效率。
无人机系统交通管理(UTM)概念于2016年由国家研究组织和行业的成员首次提出,旨在支持无人机运营的实时或近实时组织、协调和管理,包括多个超视距(BVLOS)运营的潜力。
通过UTM,预计民航当局(CAA)和空中导航服务提供商(ANSP)在其参与的范围内将能够直接或通过UTM服务提供商(USP)向无人机运营商及其远程飞行员提供有关空域限制和其他飞机意图的实时信息。无人机运营商将负责在这些限制条件下安全管理其运营,而无需从空中导航服务提供商(ANSP)获得积极的空中交通管制(ATC)服务。空中导航服务提供商(ANSP)、无人机系统交通管理服务提供商(USP)、补充数据服务提供商(SDSP)、无人机操作员、远程飞行员和其他利益相关者之间的主要通信和协调方式可以是通过应用程序编程接口(API)的高度自动化系统的分布式网络,而不是通过飞行员和空中交通管制员之间的语音通信。
尽管一些无人机无法遵守1944年12月7日在芝加哥签署并经国际民航组织大会第三十九届会议修订的《国际民用航空公约》(Doc 7300),但各国和航空业要求国际民航组织作为紧急事项,在可能与载人航空发生冲突的低空空域作业的UA数量不断增加的情况下,并为适当协调仍在国际文书飞行规则框架之外的无人机条例制定一个全球规定和指导材料基线。因此,国际民航组织在其年度无人机启用研讨会上召集了行业合作伙伴,协助提供方向和指导,以支持统一各成员国的无人机监管活动。由于UTM作为一个概念已经在发展中,因此就其框架和原则达成共同协议对于确保全球协调和互操作性至关重要。为了实现这一目标,国际民航组织正在领导各国、无人机系统行业领袖、学术机构和航空专业人员为UTM制定这一框架而努力。
该框架为一致的规则制度提供了基础,有助于就最佳做法和标准达成市场预期,并支持根据《芝加哥公约》(1944年)序言中规定的原则编制共同指导材料:
鉴于国际民用航空的未来发展将极大地有助于在世界各国和人民之间建立和维护友谊和了解,但其滥用可能会对总体安全构成威胁;鉴于避免摩擦和促进世界和平所依赖的国家和人民之间的合作是可取的;因此,下列签署国政府已就某些原则和安排达成一致,以便以安全有序的方式发展国际民用航空,并在机会平等的基础上建立国际航空运输服务,使其健康、经济化运营;为此目的,缔结了本公约。
注意-在本指导材料中,术语“无人驾驶飞机”或“UA”旨在指主要在无人机系统交通管理(UTM)框架内运行的UA。它不包括在传统空中交通管理系统内运行的UA,包括遥控飞机。


")









