
摘要:
本发明涉及防空装备领域,特别是涉及反无人机系统(UAV)。该反无人机系统由移动式塔架和基础底盘组成。塔架上配备有导弹发射装置、火炮系统、榴弹发射器、无人机压制站、可拆卸式无人机容器以及自动化多功能地面平台(RMGP)。可拆卸式容器可以在原地或移动过程中展开,展开时,会启动防护榴弹发射器组件,这一组件可在近程防御区域对敌方无人机实施打击。在中程防御区域,火炮系统会使用炮弹,借助环视与瞄准系统的激光束来完成炮弹的瞄准与引爆。而在远程防御区域,则利用配备更多杀伤元件的火箭弹击毁敌方无人机群。在地形复杂区域和居民区,为构建高效信息场,会使用自动化系统:固定翼无人机、多旋翼无人机以及自动化多功能地面平台(RMGP),这些系统能够击毁、压制或捕获敌方无人机。从而确保战术编队得到掩护,并在各种地形和城市环境下保护目标免受敌方无人机威胁。
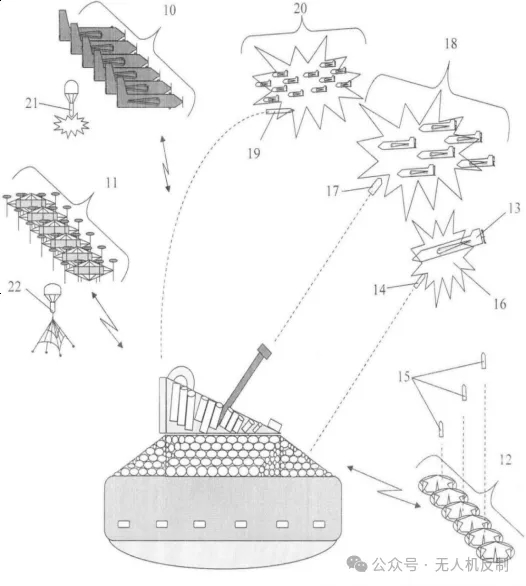
图3:作战情形下的反无人机系统
10—固定翼无人机;11—多旋翼无人机;12—自动化多功能地面平台(RMGP);13—敌方无人机;14—榴弹发射器系统发射的榴弹;15—自动化多功能地面系统发射的榴弹;16—榴弹爆炸及打击敌方无人机区域;17—激光制导炮弹;18—炮弹爆炸及打击多架敌方无人机区域;19—导弹;20—导弹爆炸及打击敌方无人机群区域;21—敌方无人机的压制和击毁手段;22—捕获敌方无人机的手段
本发明涉及防空装备领域,特别是涉及反无人机系统(UAV)。
现知有多种无人机反制技术方案,例如:使用网捕装置反制遥控无人机的方法(专利号72753)以及用于反制遥控无人机的装置(专利号72754)[1,2]。
现有技术的缺点:结构复杂,体积庞大,由于网捕装置的高空气阻力,需要大功率发动机进行拖拽,采用声热诱导目标的方法,因目标无人机(遥控无人机)能耗低,该方法效率低下,制导装置成本高,且红外传感器必须在低温环境下工作,缺乏降落伞或其他缓冲着陆装置。
另一种已知技术是用于击毁遥控无人机的装置(专利号2490585)[3]。
现有技术的缺点:在电子战环境下,使用雷达进行目标制导,这可能导致无人机在装置的视频摄像头和传感器进入工作模式时完全失控,缺乏全景摄像头,结构复杂,惯性引信对针状物体飞行方向的影响不可预测,这可能导致无法命中尺寸较小的微型无人机。
使用反直升机地雷(俄罗斯联邦专利号2237859)[4].
该已知发明有以下缺点:杀伤元件作用距离短,一次性使用,无法在移动中使用,采用主动探测方法,反制无人机的适用性低,缺乏信息场支持。
防空导弹-火炮系统(专利号2321818)[5].
防空导弹-火炮系统包括一个带有瞄准驱动装置的塔架,塔架上安装有导弹发射装置和防空自动炮、发射控制台、目标探测雷达、目标与导弹跟踪站、光电系统、计算系统、发射装置和塔架转向角生成模块、控制指令生成模块,天线采用相控阵形式并配备波束控制系统。
防空导弹系统(专利号2241193)[6]。
防空导弹系统,包括安装在载体上的旋转炮塔,炮塔上配备有导弹发射装置、发射装置的目标制导设备、被动式红外站、数字计算器、坐标提取模块和控制台。导弹配备自导引头,红外站的接收器安装在发射装置上,具备全景扫描功能。控制台设计为可拆卸的远程操作装置,用于远程控制系统的作战操作,并配备通信设备,以便将目标指示坐标从数字计算器传输到多个无目标探测装置的防空导弹系统。控制台通过数字计算器与多个防空导弹系统连接,以实现同时控制。
现代及未来的防空导弹和导弹-火炮系统能够高效解决广泛的作战任务。然而,在大城市、山地和复杂地形条件下,要反制在数百米甚至数十米距离上突然出现的无人机几乎是不可能的,尤其是在使用电子战手段的情况下。防空导弹和导弹-火炮系统的弹药量通常不超过8—12枚导弹,这在面对大量无人机(如“蜂群”)时显得不足,且炮弹缺乏在空间特定点引爆的能力。现代防空导弹和导弹-火炮系统在反制无人机时,无法实现隐蔽侦察、干扰、捕获或击毁敌方无人机。
反小型无人机综合控制系统(专利号2578524—原型)[7]。
这是一种用于探测和反制小型无人机的系统,由反制系统、战斗部、制导组件、导弹(由头部、杀伤元件、炸药、雷管组成)、探测和瞄准系统(该系统安装在三个及以上位于陀螺稳定平台上的空间分离点上)、战斗部控制系统、导航与定位系统、水平与垂直制导系统、隐身系统、拦截系统、压制系统、打击系统、电源模块、小型无人机控制系统、处理器、捕获系统、配备反制手段的无人机组成。
所有上述技术方案的共同缺点是,在防空统一系统中缺乏对无人机的综合反制手段,并且由于无法在空间中合理布置探测传感器和反制手段,无法创建多通道信息场,从而导致无法在各种应用条件下对抗无人机群(主要由于地形复杂性和大城市或居民区的多层次建筑结构所致)。
反无人机系统包括安装在基础底盘2上的可移动塔架1、基于光学、雷达和声学传感器并行工作的全景扫描和瞄准系统3。塔架1上还配备有导弹发射装置4、火炮系统5、榴弹发射器6、可搭载无人机和自动化多功能地面平台(RMNP)7的可拆卸容器,以及用于对敌方无人机进行无线电技术压制的压制站8(图1)。
反无人机系统旨在在各种条件下保护作战部队免受敌方无人机攻击,并保护重要目标。为了缩短系统进入战斗状态的时间,可拆卸容器可以在原地或行进过程中展开,同时启动防护榴弹发射系统9。榴弹发射器的布置可以实现360度方位角和90度仰角(近半球防御)的全方位防御。六套及以上的固定翼无人机10、多旋翼型无人机11和自动化多功能地面平台(RMNP)12,固定在可拆卸容器内部(图2),并在展开后根据处理器中预设的程序启动。该程序组能够创建信息场,以获取敌方无人机的精确三维立体图像,并确定其进一步的运动方向,以便通过导弹、炮弹和榴弹进行瞄准和打击(压制、捕获或拦截)[8-10]。
固定翼无人机、多旋翼无人机、自动化多功能地面平台(RMNP)与基础底盘之间的通信通过光信道和无线电信道以多通道模式维持,备用的有线通信在固定条件和大城市或居民区中使用。基础底盘配备了能够与其他部队自动化控制系统设备通信的装置,以实时获取、传输命令和信息场内容(图3)。
反无人机系统不仅通过安装在可移动塔架上的全景扫描和瞄准系统创建信息场,还通过固定翼无人机10、多旋翼无人机11和自动化多功能地面平台(RMNP)12创建信息场。多种系统的使用使得在复杂地形和居民区中能够探测和反制敌方无人机。
空中和地面平台能够自动测定彼此之间的距离及其空间坐标,从而能够确定敌方无人机13的空间坐标(图3)。每个系统上都安装有多个在光学、声学范围内工作的传感器,以及在不同可调谐雷达频段的电磁波传感器。通过配备人工智能元素的计算机来控制和处理所获得的信息,该计算机能自行选择最有效的传感器,以便在不同应用条件下更精确地探测和确定无人机的空间坐标,并对杀伤装置进行瞄准。计算出的空间坐标通过激光或无线电通道,或者通过备用有线通道传输到距离敌方无人机13最近的压制、捕获或打击装置上。
反无人机系统的工作顺序如下:同时记录视频序列帧,并确定生成图像的几何和颜色变化[7]。根据本发明,控制图像(最明显的)和比较数字图像的每个图像片段是由三个及以上配有多元素高速光电接收器的相同视频系统(传感器)同时记录。图像分析在计算机上进行,使用三个及以上接收设备可以生成敌方无人机的可靠三维立体图像。为了在能见度差的情况下(如浓雾、完全黑暗等)最可靠地探测和识别敌方无人机,当计算机选择的光学通道无法有效使用时,在探测过程中会使用声学或雷达通道。传感器被同时部署在空中和地面平台上,并同时记录目标的出现情况,同时通过计算机确定敌方无人机13在声学和雷达电磁波范围内的空间坐标。通过持续确定空间坐标,计算机计算出敌方无人机的速度和运动方向,这使得可以在反制敌方无人机的责任区域的整个信息场中对敌方无人机13进行跟踪和瞄准。
根据敌方无人机13对受保护目标或掩护部队构成的威胁程度,选择相应的对抗手段(图3)。
如果敌方无人机13处于该系统基础底盘所在的最近防御半球范围内,并且处于指定的防护区域内,则采用由榴弹发射系统14发射的榴弹或由自动化多功能地面平台(RMNP)12发射的榴弹15进行打击。此时,榴弹16的爆炸区域可根据基础底盘系统2和自动化多功能地面平台(RMNP)12在信息场的移动进行调整。榴弹发射系统14是基于902B“乌云”烟雾弹发射器[11]构建的,其在空间中的定向布置旨在确保对敌方无人机在整个半球范围内实现三重打击。
如果在基础底盘防御半球内和指定保护区域的直接可视半径内发现多架敌方无人机,则采用炮弹17进行打击,其制导和引爆通过全景扫描和瞄准系统3的激光束在炮弹爆炸区域实施,以击毁多架敌方无人机18。炮弹及其相应火炮系统的原型可视为57毫米火炮系统[12]及其配套的制导弹药[13]。
如果敌方无人机群位于远半球防御区域,利用基础底盘2防御可视范围之外的防御信息场,则使用导弹19[8],导弹需配备更多能够打击敌方无人机群的杀伤元件。此时,导弹爆炸区域20由固定翼无人机、多旋翼无人机和自动化多功能地面平台(RMNP)12通过激光束或信息场的无线电信号进行校正,备用的有线通信在固定环境和大城市或居民区使用。
如果地形条件不允许使用上述手段进行反制,则使用固定翼无人机10、多旋翼型无人机11和自动化多功能地面平台(RMNP)12,这些平台可配备六个及以上能够在空战中压制和打击敌方无人机的容器。通过多通道通信手段,由处理器进行控制并将结果传输至基础底盘以及其他移动平台。[15]。
如果由于人员密集和人民聚集而无法使用杀伤性武器,则使用固定翼无人机和多旋翼无人机,这些平台可配备六个及以上能够在空战中用网22捕获敌方无人机并将其撤离至安全地点或疏散区域的容器[16]。
构建反无人机系统信息场的方案如图4所示。
因此,反无人机系统能够在作战部队执行作战任务时为其提供掩护,保护重要目标,并适应各种复杂地形条件和多层次的大都市或居民区环境。
反无人机系统有以下附图:图1.行军状态下的反无人机系统;图2.展开状态下的反无人机系统;图3.战斗状态下的反无人机系统;图4.反无人机系统信息场构建方案。
反无人机系统图纸中包含以下标注:
1.可移动塔架;
2.基础底盘;
3.全景扫描和瞄准系统;
4.导弹发射装置;
5.火炮系统;
6.榴弹发射器;
7.搭载无人机(UAV)和自动化多功能地面平台(RMNP)的可拆卸容器;
8.无人机压制站;
9.近程打击敌方无人机的榴弹发射系统;
10.固定翼无人机;
11.多旋翼无人机;
12.自动化多功能地面平台
13.敌方无人机;
14.由榴弹发射系统发射的榴弹;
15.由自动化多功能地面平台(RMNP)发射的榴弹;
16.榴弹爆炸及打击敌方无人机的区域;
17.激光束制导炮弹;
18.弹药爆炸及打击多架敌方无人机的区域;
19.导弹;
20.导弹爆炸及打击敌方无人机群的区域;
21.压制和打击敌方无人机的手段;
22.捕获敌方无人机的手段。
信息来源
帕尔霍缅科・弗・亚,乌斯季诺夫叶・米,普希金・弗・亚,别利亚科夫・弗・亚,希什科夫・谢・弗。用于反制远程遥控无人机的装置。—俄罗斯联邦知识产权局,实用新型专利号№72754,2008年4月27日。
博戈莫洛夫・阿・伊,帕尔霍缅科・弗・亚,乌斯季诺夫・叶・米,叶利扎罗夫・谢・谢,伊斯科尔金・德・弗,希什科夫・谢・弗。用于反制远程遥控无人机的陷阱网装置。—俄罗斯联邦知识产权局,实用新型专利号№72753,2008年4月27日。
戈洛杰耶夫・阿・伊,奇斯佳科夫・尼・弗,用于摧毁远程遥控无人机的歼击装置。—俄罗斯联邦知识产权局,实用新型专利号№2490585,2012年5月15日。
奥金佐夫・弗・亚,多尔戈皮亚托娃・娜・罗,科贝利金・伊・费,科斯季列夫・弗・康,拉多夫・谢・弗,梅塔索夫・弗・费,波波夫・弗・亚。反直升机地雷。—俄罗斯联邦知识产权局,实用新型专利号№2237859,2004年10月10日。
希普诺夫・阿・格,罗沙尔・列・鲍,斯卢金・弗・根,库兹米奇・亚・列,祖巴列夫・阿・阿。防空导弹—火炮系统。—俄罗斯联邦知识产权局,实用新型专利号№2321818,2008年4月10日。
邦达连科・亚・鲍,布鲁森佐夫・弗・叶,德鲁津・谢・弗,基里琴科・阿・格,科伦塔耶夫・弗・尼,克拉马连科・弗・亚,库罗夫・德・亚,莫宁・弗・斯,普申尼奇尼科夫・阿・尼,季克梅诺夫・弗・尼,托尔斯托夫・弗拉基米尔・亚。防空导弹系统。—俄罗斯联邦知识产权局,实用新型专利号№2241193,2004年11月27日。
希什科夫・谢・弗。反小型无人机综合控制系统。—俄罗斯联邦知识产权局,实用新型专利号№2578524,2014年2月25日。
伊斯科尔金・德・弗,希什科夫・谢・弗,捷列申・亚・弗,克尼亚兹金・亚・弗,西尼亚耶夫・叶・根,斯托利亚罗夫・弗・斯,彼得连科・弗・伊。用于构建反制小型无人机信息管理系统的探测设备空间布局计算程序。计算机程序国家注册证书号№2017614881,2017年4月27日。
伊斯科尔金・德・弗,希什科夫・谢・弗,捷列申・亚・弗,克尼亚兹金・亚・弗,西尼亚耶夫・叶・根,斯托利亚罗夫・弗・斯,彼得连科・弗・伊。根据小型无人机在四维空间中的移动情况计算其探测设备有效布局的程序。计算机程序国家注册证书号№2017615162,2017年5月5日。
乌里扬诺夫・根・尼,希什科夫・谢・弗,伊斯科尔金・德・弗,秋先科・叶・亚,彼得连科・弗・伊。采用差分测距法确定声源目标坐标的程序。计算机程序国家注册证书号№2018612527,2018年2月19日。
里亚博夫・康斯坦丁。装甲车辆的防护:威胁与解决方案。《军事评论》。2016年3月15日。https://topwar.ru/92302-zaschita-bronetehniki-ugrozy-i-resheniya.html。
里亚博夫・康斯坦丁。配备57毫米火炮的未来自行高射炮:预测尝试。《军事评论》。2015年7月20日。https://vpk.name/news/136117_perspektivnaya_zenitnaya_samohodka_s_57mm_rudiem_popyitka_prognoza.html.
科罗特科夫・奥・弗,丘巴尔・阿・费,科尔涅耶夫・阿・鲍,沃罗帕耶夫・谢・尼。创建57毫米战区高射炮系统的现实性与前景。《军事评论》。http://alternathistory.com/content/aktualnost-i-perspektivy-sozdaniya-57-mm-zenitnogo-artilleriyskogo-kompleksa-polya-boya-0。
萨莫伊洛夫・帕・弗,伊万诺夫・基・亚。小型无人机带来的威胁及其最有效反制方式的确定//《青年学者》。—2017年。—第45期。—第59-65页。—网址https://moluch.ru/archive/179/46398。
希什科夫・谢・弗。小型无人机反制装置。实用新型专利号№145279,2014年9月20日。
希什科夫・谢・弗。小型无人机捕获装置。实用新型专利号№150610,2015年2月20日。
[57]发明权利要求
1.反无人机系统(UAV),由移动炮塔、基础底盘、导弹发射器、激光制导火炮系统、榴弹发射器、全景扫描和瞄准系统、固定翼无人机、多旋翼无人机、配备光学、雷达和声学传感器的自动化多功能地面平台(RMNP)、搭载反制手段的容器、基于人工智能的处理器和计算机组成,其特征在于,全景扫描和瞄准系统与固定翼无人机、多旋翼无人机以及安装在可拆卸容器内部的自动化多功能地面平台的光学、雷达和声学传感器协同工作,部署后启动并创建信息场,以在指定区域内探测敌方无人机,随后使用打击、压制、捕获和将其撤离至安全地点或疏散区域的手段对其进行反制。
2.根据权利要求1所述的反无人机系统,其特征在于,为了缩短系统进入战斗状态的时间,可拆卸容器可在原地或行进中展开,同时启动防护榴弹发射系统、固定翼无人机、多旋翼无人机、自动化多功能地面平台,并根据预置在处理器中的程序启动运行。
3.根据权利要求1所述的反无人机系统,其特征在于,对在基础底盘最近防御半球内及指定防护区域内的敌方无人机进行反制,是通过防护榴弹发射系统发射的榴弹来实现的,该系统配备的榴弹发射器导向装置可提供360度方位角和90度仰角的全方位防御,并在整个半球范围内对敌方无人机进行三重打击。
4.根据权利要求1所述的反无人机系统,其特征在于,在基础底盘防御半球内和指定保护区域的直接可视半径内,对敌方无人机的反制通过炮弹来实现,由全景扫描和瞄准系统利用激光束对多架敌方无人机所在区域进行瞄准和引爆弹药。
5.根据权利要求1所述的反无人机系统,其特征在于,在基础底盘防御外的远程防御半球区域内,通过使用增加了杀伤元件数量的导弹来反制敌方无人机,该导弹能够打击敌方无人机群;同时导弹的爆炸区域由固定翼无人机、多旋翼无人机和自动化多功能地面平台(RMNP)的空中平台通过激光束或信息场的无线电通道进行校正,备用的有线通道在固定环境、大都市或居民区中使用。
6.根据权利要求1所述的反无人机系统,其特征在于,在指定防护区域内,当无法使用基础底盘的打击手段时,由自动化多功能地面平台(RMNP)发射榴弹来打击敌方无人机;同时榴弹的爆炸区域通过自动化多功能地面平台(RMNP)在空间中的移动进行校正,这基于利用信息场和软件系统,该软件系统能够合理地在空间中布置探测和打击敌方无人机的手段。
7.根据权利要求1所述的反无人机系统,其特征在于,在指定防护区域内,当无法使用基础底盘和自动化多功能地面平台(RMNP)的打击手段时,对敌方无人机的打击通过固定翼无人机和多旋翼无人机空中平台来实现;这些平台可搭载六枚及以上榴弹,榴弹可通过降落伞或无降落伞方式投放,以此打击敌方无人机,无人机处理器负责计算榴弹投放位置,计算结果通过多通道通信手段传输至基础底盘和其他移动平台。
8.根据权利要求1所述的反无人机系统,其特征在于,在指定防护区域内捕获敌方无人机是由固定翼无人机和多旋翼无人机的空中平台来完成的;这些空中平台可搭载六个及以上装有网状捕获装置的容器和由无人机处理器控制的发射装置,捕获结果通过多通道通信手段传输至基础底盘和其他移动平台。
9.根据权利要求1所述的反无人机系统,其特征在于,在指定防护区域内压制敌方无人机,既可以通过安装在基础底盘上的基站来实现,也可以通过安装在固定翼无人机、多旋翼无人机等空中平台以及自动化多功能地面平台(RMNP)的容器内的压制设备来实现。由处理器进行控制,压制结果通过多通道通信手段传输至基础底盘和其他移动平台。
10.根据权利要求1所述的反无人机系统,其特征在于,固定翼无人机、多旋翼无人机、自动化多功能地面平台(RMNP)台与基础底盘之间的通信通过多通道光学和无线电通道维持;备用的有线通道在固定环境、大都市或居民区中使用。基础底盘配备有相关设备,可与其他部队自动化指挥系统保持通信,以便实时获取、传递指令以及共享信息场的实际情况。
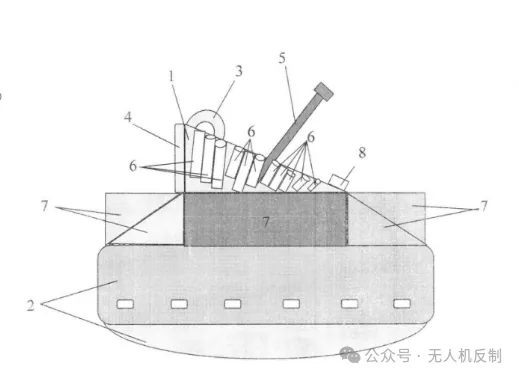
图1.行军状态下的反无人机系统
1-可移动炮塔;2-基础底盘;3-全景扫描和瞄准系统;4-配备导弹的发射装置;5-火炮系统;6-榴弹发射器;7-搭载无人机(UAV)和自动化多功能地面平台(RMNP)的可拆卸容器;8-无人机压制站
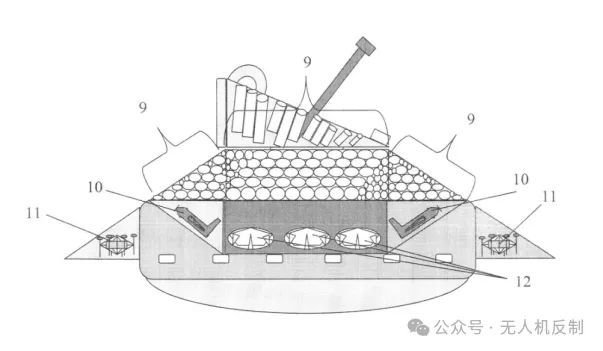
图2.展开状态下的反无人机系统
9—近距离打击敌方无人机的榴弹系统;10—固定翼无人机;11—多旋翼无人机;12-自动化多功能地面平台(RMNP)
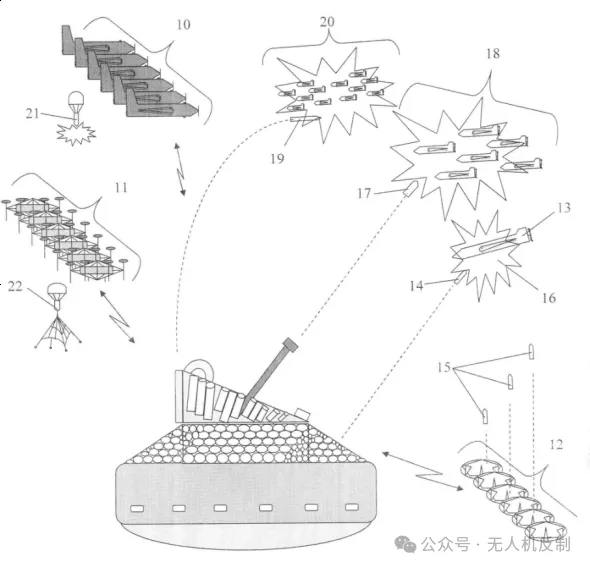
图3.战斗状态下的反无人机系统
10-固定翼无人机;11-多旋翼无人机;12-自动化多功能地面平台(RMNP);13-敌方无人机;14-榴弹发射器系统发射的榴弹;15-自动化多功能地面平台(RMNP)发射的榴弹;16-榴弹爆炸及打击敌方无人机区域;17-激光制导炮弹;18-炮弹爆炸及打击多架敌方无人机区域;19-导弹;20-导弹爆炸及打击敌方无人机群区域;21-敌方无人机的压制和击毁手段;22-捕获敌方无人机的手段
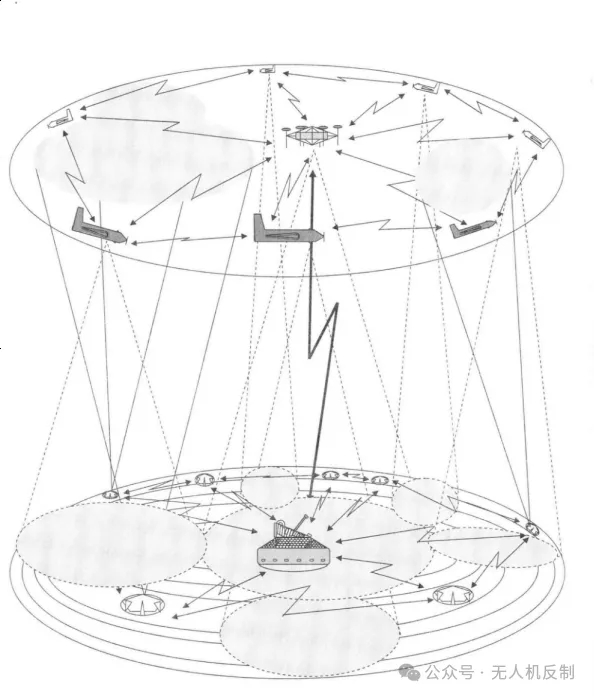
图4.反无人机系统信息场构建方案


")









