
前言
芬兰国防部进行的反无人机研究结果已经公布。这个研究项目叫做:以无人机蜂群群体智能反制敌无人机蜂群,由国防科学顾问委员会资助,测试(通过模拟)了一个假设,即有效和经济地防御攻击无人机群的最佳方式是“以牙还牙”——即使用另一个无人机群。该项目的最终目标是确定使集体智能范式适应群体战术的方法,并开发概念、分析和数字工具来评估国防应用中的性能。
摘要
CounterSwarm项目旨在检验这样一种假设,即有效且经济地防御无人机群的最佳方式是“针锋相对”,并使用另一个无人机群。在自然界中,最成功抵御群居昆虫攻击(自主无人机群的最初灵感来源)的物种是其他群居昆虫。原因很简单:双方在应对高度动态的情况下,基于不完整的信息,在没有任何集中控制结构的情况下(以及与之相关的脆弱性),都具有相同的内在能力。该项目的最终目标是确定使集体智能范式适应群体战术的方法,并开发概念、分析和数值工具来评估国防应用中的性能。
笔者在查阅相关资料的基础上,对英文版原文资料进行翻译整理,力求分析探索反无人蜂群的方法,供读者学习借鉴。如有不准确的地方,请参照英文版资料原文。
1.项目背景
在过去的十年里,无人机作为方便、远程控制的机载传感器平台在广泛的应用领域已经成为惯例。侦察和监视任务就是这些领域之一,最近受到了国防解决方案用户和供应商的极大关注。随着实验部署现在成为事实,研发的重点已经有效地转移到了下一步,即将机器智能纳入无人机设计,以追求不断提高的自主性和减少对人类直接控制的依赖。
值得该领域研究人员关注的许多方面之一是在彼此的传感和驱动范围内同时工作的单个自主单元之间的相互作用。群体中的协调飞行一直是最近许多出版物的主题,这些出版物强调了集体行为提供的各种机会,并确定了以去中心化、适应性和动态的方式实施集体行为的挑战(而不是使用预定义的静态轨迹进行集中编排)。在这种情况下,对可能具有不同、可能相互排斥的目标的多个蜂群之间的相互作用模式的研究提出了重大的科学和技术挑战。与防御部门相关的是两个自主蜂群之间的对抗动态,其中一个试图到达预定目标(攻击者),另一个试图阻止它(防御者)。
这种群体对抗的许多例子在自然界中都存在,可以作为定义随机、基于规则的决策系统的蓝图,当单个自治单元独立应用(但有时基于共享信息)时,可以促进对另一个群体构成的威胁做出集体反应。这一假设构成了Counter Swarm项目的基础和理由,本报告总结了该项目的目标、方法、结果和结论。
2.研究目标、研究内容及研究计划
该项目的研究目标有两个方面:
·为建模和理解由自主单元组成的两个相互敌对的蜂群之间的相互作用动力学奠定坚实的科学基础。该框架(结合数值和分析方法)有望阐明基本财产,并适用于自然发生的蜂群及其人工对应物。
·开发一个(集合)模拟工具,用于研究各种攻击和防御策略(以决策规则集和参数值的形式指定)在特定场景下的性能,其中一个群体试图对目标造成伤害,而另一个群体则试图保护目标。第二个框架也将用于演示和训练目的。
这两个互补的目标旨在通过创建我们自己的模拟引擎集合来实现,这些引擎侧重于机器智能方面(决策和交互动力学),而不是例如精确的飞行建模(就像许多可用的无人机模拟器一样)。这些引擎用于探索参数空间,揭示和记录基本系统财产(第一个目标),并确定基于群集的反温解决方案为完成其任务应具备的关键特征(第二个目标)。
3.研究模型及方法
从根本上讲,两个对立群体之间的对抗可以被视为个体之间的一系列遭遇,这些遭遇具有各种可能的结果,共同决定了整体冲突的结果(一方的胜利、平局等)。即使是这样一个简化的模型也允许探索多个相关因素,例如数量优势的影响,个人的相对实力(例如,一方由本质上或多或少有可能赢得决斗的单位组成),以及它们组合产生可变统计权重的最终结果的方式。
例如,可以定量研究更多的数字如何抵消个人弱点(在一对一对抗中获胜的概率较低),这对理解和评估群体战术的性能显然很有兴趣。在自然界中,人们可以想到蜜蜂对黄蜂袭击的反应方式,个体成功的概率和从任何一个物种使用的特定“武器”中提取的数量之间的相互作用。在技术领域,一个等效的场景是一群能力有限的轻型无人机(UAV),面对少数更重、更先进的单元。
这个基本的定量模型是为了简单易处理而设计的,并使用数值方法来补充数学分析。它只有三个独立的参数:
1.SA:群体A的初始大小/强度
2.SB:群体B的初始大小/强度
3.WA:A在决斗中战胜B的概率(假设每次相遇都会有一个人被淘汰,所以B战胜A的概率只是1–WA)
然而,这是一个完全非空间的模型,它有效地假设了两个蜂群占据相同的区域,并且两侧的每个单元都容易与对方的每一个单位交战。尽管这可能是对一些对抗的合适描述,但它并不能充分捕捉到更复杂的场景。例如,攻击者可能正在探测敌人的防御,以寻找薄弱点,这意味着有多个地点和载体,这为更先进的机动开辟了可能性,例如侧翼。值得注意的是,这种“策略”不一定是有意的,也不一定是明确计划的结果,而是可以从积极和消极反馈的结合中产生,这些反馈在许多昆虫群落的组织中发挥着关键作用。
为了捕捉由集体智能原理控制的两个昆虫群落或成群的自主设备之间的这种对抗的空间方面,需要另一种方法,这就是为什么创建了周界防御模型的原因。该模型是一维的,具有周期性边界条件(即环),并将对抗视为攻击者和防御者的子群体之间的一组局部交战,这些子群体能够在多个“战线”之间移动。
在许多冲突情况下,攻击者的目标是在某个时间点在一个地点取得决定性优势,以突破敌人的防线。防守队员的目标是通过在最大压力下建立防守来防止这种情况的发生。这对双方来说显然都是一个动态问题,因为力量的初始分布可能会使双方都无法实现目标(例如,攻击者在一个位置有轻微优势,但不够强大,无法取得明显突破,这对双方都不理想)。对抗如何发展取决于双方通过重新部署兵力来应对对方行动的方式。该模型被广泛用于记录群体对抗的基本动力学。
还开发了第三个也是最后一个正式模型,对个人沿周边移动的方式引入了一些限制。这使得我们能够研究机动性的影响(在什么时候,在什么情况下,比对手更快地重新部署的能力会转化为明显的优势),以及攻击群和防御群之间潜在的不对称性(前者可能需要在周边行进更长的距离)。
用于实现第二个研究目标(在涉及对指定目标的攻击的场景中评估各种群战术的性能)的数字工具(即“CounterSwarm模拟器”)遵循迭代开发周期,该周期考虑了芬兰国防军(FDF)对早期原型的意见和建议。该工具的最终版本包括在一平方公里面积和100米高度的离散三维空间中运行的蒙特卡罗模拟,该空间由十万个10 x 10 x 10米的立方体单元组成。根据国防部的要求,它具有复杂的几何形状,形状和高度可变的建筑物阻碍了通往目标的某些路径(位于建模区域的中心,见图1),从而产生“通道”效应,可能影响攻击和防御战术的相对性能。
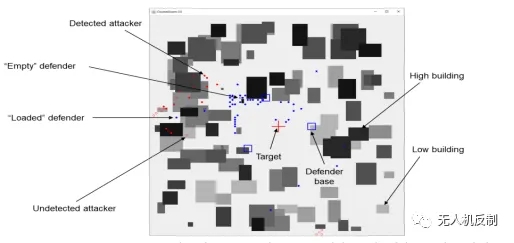
图1:CounterSwarm模拟器的情景图片,带有所用符号的图例
此外,在2021年8月13日至2021 9月7日期间,采访了六名军事专家。这些专家代表了国防军总部、陆军总部、海军学院和芬兰国防研究局。三名VTT专家通过微软团队远程进行了采访。如果受访者同意录音,访谈将被录音。如果没有给予录音同意,在采访过程中会做详细的记录。
每次采访持续了大约两个小时,分为两个主要部分。首先,对机器人群在军事任务中的使用进行了一般性讨论;之后,我们详细讨论了CounterSwarm模拟器及其进一步开发的方法。
4.结果和讨论
本章讨论了CounterSwarm项目的结果,分为两个子部分:定量模型和访谈结果。除了这些总结的结果外,项目开始时的小规模文献综述、开发的CounterSwarm模拟器(及其不同场景)以及项目结束时制作的CounterSwarn模拟器介绍视频也可以算作项目的结果。
4.1定量模型
基本定量模型的关键结果最好用方程来概括,该方程给出了群体A赢得对抗的概率:

该方程允许根据相遇前两个相对蜂群的相对个体和集体强度来预测最有可能的结果。
外围防御模型暴露了在非常基本的设置(两条战线)中,即使是相对简单的基于集体决策的资源分配近似,也会出现非常复杂的行为。它证实,类似于诱饵和侧翼机动的看似“先进”的战术可以在没有中央计划的情况下从简单的放大机制中出现。对四维参数空间的深入探索揭示了稳定和不稳定平衡的存在,时间序列具有放大和阻尼振荡的特征,这取决于参数值和初始条件。
第三个模型(包括可变流动性考虑和更准确的空间约束表示)在撰写本文时仍在进行中。仅覆盖参数空间的一小部分区域的初步结果似乎表明了稳定效应,初始不均匀性的放大远比振荡更常见。
在更具体的场景(即复杂的3D环境)中对群体战术的评估结果采用一组规则和参数值的形式,这些规则和参数提供了保护指定目标免受攻击群体攻击的最佳机会。这些强调了以下方面的组合:
·快速反应(即飞向攻击者,在距离目标一定距离处拦截攻击者)
·有限的招募能力(即,允许防御者对他人检测到的威胁做出反应,但只有在已经接近事件的情况下)
·限制周边(即,在距离目标不远的地方追赶撤退的攻击者,以避免落入诱饵演习)
4.2讨论结果
本节的访谈结果摘要基于个别专家的意见,因此并非所有受访者都达成共识。它分为两部分:关于群集的一般级别结果和关于项目中开发的模拟器的结果。
4.2.1关于群集的一般级别结果
总的来说,受访者认为自主机器人群可以被视为现代战争方式的潜在游戏规则改变者。例如,如果所有类型的机器人群都可以在所有分支中使用,那么不同军事分支之间的边界可能会变得模糊。机器人集群可以在陆地、海上和空中使用,集群也可以应用于网络空间。在不久的将来(大约5-10年),无人机群之间的战争在技术上是可能的,但恶劣的天气和环境条件可能会影响它们的有效使用。
总的来说,道德和司法限制将防止在直接军事犯罪中使用成群的自动驾驶汽车。人类的作用是限制自主系统之间的战争,防止局势进一步升级。然而,随着未来战争节奏的加快,这一目标变得更加困难。
包围和同时性是军事集群的关键特征:集群使包围敌方无人机并从多个方向同时攻击它们成为可能。周围的蜂群也可以通过反复出现和消失来进行脉冲式的肇事逃逸攻击。为了可靠地实现这些积极影响,需要一定程度的自主权,这样群成员才能决定如何行动。决策是分散的,并在开展业务的地方进行。
Swarming还提高了灵活性:即使大部分无人机已经被摧毁,任务也可以继续。可处置性和成本效益是这里的关键指标:如果蜂群由廉价的无人机组成,如果需要,可以牺牲整个蜂群。建造包括有人和无人部队的蜂群并不一定可行,因为它们可能会限制彼此的能力。
Swarming提供了新的机会,通过饱和空域或定期引导新的蜂群进入空域来欺骗敌人。从防御者的角度来看,如果空域充斥着这些成群的无人机,那么很难识别携带爆炸物或无害诱饵部队武器的武装无人机。
在第一阶段,自主蜂群可以用于监视/侦察行动和区域监测。例如,无人机群可以在军事区域进行长期巡逻,探测和识别可能的未知物体,并对其做出快速反应。由于如果攻击的无人机群不发射任何东西,就很难检测到它,因此需要一个分层系统来检测和识别无人机群。分层系统应包括各种检测系统(例如,传感器、雷达和激光器)。受访者特别强调,仅使用雷达可能很难检测和识别蜂群。
对抗机器人群的一个重要防御策略是干扰和/或阻止通信。一种同时压制多架攻击无人机的方法是用电磁脉冲破坏无人机的电子设备。这种方法的缺点是,这种脉冲很容易同时摧毁自己的设备。物理缓解措施,如投射物和无人机碰撞,被认为特别适合反群集。
4.2.2关于开发模拟器的结果
在访谈的后半部分,我们展示了一些CounterSwarm模拟器的运行,并讨论了模拟器的关键功能。在这一部分中,一位受访者向受访者展示了CounterSwarm模拟器。采访者指出,讨论模拟器的目的是为了支持开发。阐明了模拟器的特点,如群体大小、攻击距离、躲避距离、警戒周长、反击距离和射击距离。访谈者表明,所提出的控制参数的影响使各种战术能够以参数值组合的形式实施,这些参数值用于控制单个部队的自主决策,例如追击、包围和外围防御。
在他们的反馈中,受访者认为模拟器有助于促进反集群的战术思维。有几个参数被认为对控制攻击和防御蜂群的行为很重要,例如攻击和反击距离以及方向改变的概率。受访者认为,在反群集环境下,继续研究各种控制参数对群集行为的影响很重要。对机器人群的战术控制提出了一些改进建议,例如将机器人群分成更小的小组的可能性、引入子任务、优化反击和引入新的场景(例如侦察)。
根据访谈结果,将开发的群体智能系统的初步总结结构与进一步研究中的相关主题概述如下:
1.群体智能:需要从自主单元到协调群体行为的分级结构
2.群体行为:需要动态分组和子任务
3.无人机的特点:例如,应考虑速度、灵活性和有效载荷
4.环境:需要考虑建筑物、地形、固定传感器和武器
5.群体控制:需要根据态势演变和任务目标进行初始参数和自主参数调整;
6.模拟器运行分析系统:需要开发一个决策支持系统,用于从大量模拟中得出结论。
5.结论
在本总结报告中,我们介绍了CounterSwarm项目的研究目标、方法和结果。该项目的最终目标是确定使集体智能范式适应群体战术的方法,并开发概念、分析和数值工具来评估国防应用中的性能。我们提出了一个基本的定量模型,该模型被广泛用于记录群体与群体对抗的基本动力学,一个实现的数值模拟工具(即CounterSwarm模拟器),并讨论了与群集和我们的CounterSwarm仿真器相关的专家访谈结果。接下来,我们从每一项研究中得出结论,批判性地检验所获得的研究结果,并讨论进一步的工作。
用于控制无人军用机器的控制算法将对结果发挥关键作用,可以预见算法开发方面的竞争。在这个CounterSwarm项目中创建的基本定量模型中,我们忽略了精心策划的同时行动,并将每次遭遇视为一场“决斗”,总是在两个对立的单位之间进行战斗;将交战结果简化为输赢(因此我们不会处理继续参与冲突的受损设备)。我们进一步假设,任何此类决斗的结果概率都可以使用经验和历史数据进行估计,并且结果完全取决于决斗的单位类型(型号/品牌)。创建的简单定量模型使我们能够确定(结果的概率),假设我们知道种群规模SA、SB以及A在决斗中战胜B的概率WA。这反过来使我们能够估计在给定概率P下成功“守住防线”(击败攻击者)所需的防守人数,参见第4.1节中的等式。
引入的模型允许对单元的分配进行自适应控制。根据半自主无人机群很快将成为现实的预期,我们提出了所提出的方法,作为设计自适应控制元件的基础,以根据不同位置敌人的感知强度(以及赢得决斗的预期机会)来驱动群成员的部署和重新部署。关于定量模型的实际考虑如下:
(a)当前线有很多位置时,它们之间的行进距离会不同。
(b)前线本身的形状会对进攻方和防守方产生不同的影响(除非是直线)。
相应地修改所提出的方程将打破对称性,但我们表明,为了解决(a)我们可以将重新部署限制在相邻位置,并就(b)争论这可能可以通过为攻击者和防御者不同地定义位置的邻接来包括。
CounterSwarm模拟器的运行表明,有大量的群体控制参数容易影响群体对抗的结果。在这个项目中,只有几个基本参数(例如,防御者的移动半径)可以被彻底调查,并且它们对不同战斗场景中对抗最终结果的影响可以被适当量化。此外,基于我们的模拟,我们确定了一组单独的规则(即“快速反应”、“有限的招募能力”和“有限的周边”),这些规则可以给自主无人机群击退自主无人机攻击的最佳机会。
该项目中进行的采访还揭示了领域专家对集群的总体看法,即我们的CounterSwarm模拟器,并使我们能够为集群智能系统开发一个结构以供进一步开发。根据我们的研究结果,为了充分了解无人机群在国防领域的潜力和威胁,以及相互敌对的无人机群之间的互动动态,还有大量工作要做。
5.1对研究结果和进一步工作的批判性审查
对研究结果的严格审查表明,该项目中创建的模拟和模型只是第一步。例如,当前版本的开发模拟器不够先进和逼真,无法用于无人机群控制的实际军事应用。我们之所以使用更多的通用方法,首先从基础上关注这个开始阶段,是因为这使我们能够为未来的开发构建一个更灵活的解决方案。
我们可以在科学和实践两个层面上进一步开展工作。在科学层面上,我们的目标是继续努力,建立一个统一的群体相互作用理论,在这个理论中,我们将能够识别群体行为的基本财产。如果我们能够进一步发展现有的数学框架,了解攻击者和防御者之间的力量比例将使我们能够估计赢得决斗的概率。未来,这种方法将允许为此目的开发一种预测工具。
在实践层面,开发的模拟器工具和收到的项目结果可用于国防专家的培训。这将使他们能够接受训练,例如,与自主蜂群相关的战术思维,以及自主系统如何改变总体战争。此外,模拟器的游戏化和与国防专家进行比赛以找出最佳策略,可能是增强他们对所开发系统的动力和兴趣的一种方式。
最后,进一步开发CounterSwarm模拟器以考虑实际的军事场景和现场情况,将使其更直接地适用于实际的物理无人机群。
6.研究项目产生的科学出版和其他报告
1.Saffre, F., Hildmann, H., Karvonen, H., Laarni, J., Lastusilta, T., Väätänen, A. & Deneubourg, J.-L (to be submitted to Swarm Intelligence Journal). The Dynamics of Swarm vs Swarm Confrontation. Springer.
一篇关于相互敌对的生物群或人工群之间相互作用的基本动力学的论文。系统地记录关键参数的影响并通过数学和数值方法的结合进行详尽的分析。讨论了无人机机群高效战术设计的意义。
2.Laarni, J., Väätänen, A., Karvonen, H., Lastusilta, T. & Saffre, F. (under review). Development of a Concept of Operations for a Counter-Swarm Scenario. 19th International Conference on Engineering Psychology and Cognitive Ergonomics. Springer, Cham.
一篇关于反群场景作战概念(ConOps)开发的论文,在反群场景中,防御方使用无人机群来防御目标免受攻击的无人机群的攻击。介绍了ConOps的主要特点以及专家访谈的摘要。
3.Saffre, F., Hildmann, H., Karvonen, H., & Lind, T. (2022). Self-Swarming for MultiRobot Systems Deployed for Situational Awareness. In New Developments and Environmental Applications of Drones (pp. 51-72). Springer, Cham.
一本书的章节描述了一个分散的框架,用于由一群自主无人机监视任意大小和形状的区域,其规模远远超过了单个单位的范围和自主性。所提出的解决方案使用数字信息素进行协调,并具有紧急分工的特点。在多个场景中评估性能。
4.Saffre, F., Hildmann, H., & Karvonen, H. (2021). The Design Challenges of Drone Swarm Control. In International Conference on Human-Computer Interaction (pp. 408-426). Springer, Cham.
一份讨论无人机机群通用和可重复使用控制策略设计的会议论文。对直接控制方法和间接控制方法进行了区分。前者被定义为需要至少一个由人类飞行员远程操作的单元。后者涉及指定高水平的目标,然后通过集体智慧自主实现这些目标。
此外,早期MATINE项目RoboConOps的以下期刊出版物(目前正在审查中)与本主题相关:
Laarni, J., Koskinen, H., & Väätänen, A. (under review in Journal of Robotics and Control). Concept of Operations as a boundary object for knowledge sharing in the design of robotic swarms.


")









